고정 헤더 영역
상세 컨텐츠
본문
📌자율주행 자동차
-운전자가 개입 없이 주변환경을 인식한 뒤 스스로 판단해 주행하는 차량
📌자율주행 단계

➡️ 레벨3 이상이여야 시스템이 전체주행기능을 담당함 (진정한 자율주행)
📌자율주행차 시장 현황 및 전망

➡️최근 판매 자율주행차는 대부분 레벨2
➡️2030년은 레벨3이상이 더 많을 것으로 예상
➡️많은 회사들이 레벨3에 도전 중
📌완성차 업체의 자율주행단계 개발 현황
| 회사 | 단계 | 시기 | 차종 | 비고 |
| 혼다 | 레벨3 | 2021.03 | 레전드 | 100대 한정출시 일본 인증 |
| 벤츠 | 레벨3 | 2022.5 | 2024년형 EQS, S클래스 |
독일인증 23.01 미국인증 |
| BMW | 레벨3 | 예정 | 7시리즈 | |
| 현대 | 레벨3 | 예정 | G90 | |
| 테슬라 | 레벨2.5 | 2021초 | 모델Y |
📌자율주행 자동차 작동 원리
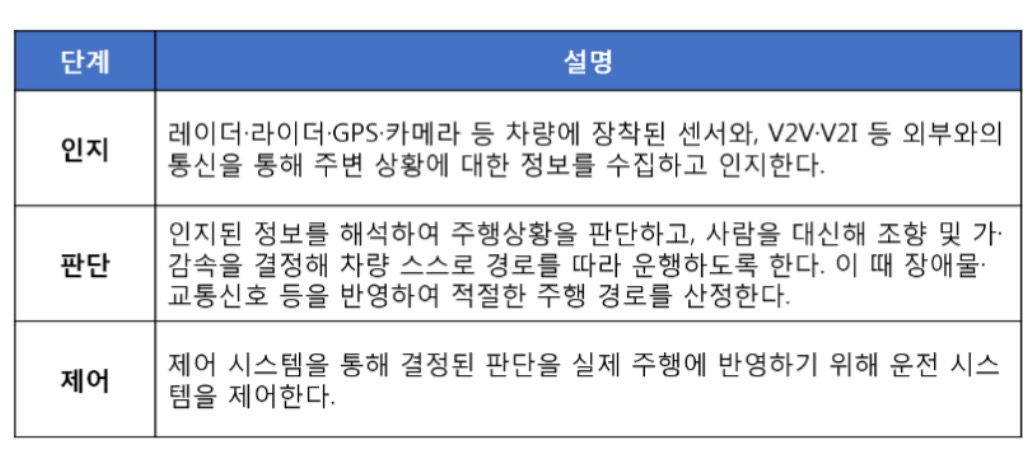
인지 -> 판단 -> 제어 순서대로 작동
📌인지 결과 예시

📌작동원리 구현 방법
1️⃣차량의 자율성: 차량 자체의 자율주행에 중점을 둔 ADAS(Advanced Driver Assistance Systems) 의존적인 방식
2️⃣협조운전: ICT 통신을 활용하여 외부와의 협조에 중점을 둔 V2X(Vehicle to Everything) 의존적인 방식
➡️자율주행은 두가지 방법이 합쳐져서 구현
📌통신기술
V2X(Vehicle to Everything): 자율주행차에 사용되는 통신 기술; 차량이 유•무선 통신망을 이용해 주변 차량 혹은 도로 인프라 정보를 교환하고 공유하도록 하는 기술
V2V(Vehicle to Vehicle): V2X의 양상 중 하나로, 차량간 방식. 앞에서 사고가 났다면 이를 뒤에 오는 차량에게 전달해 연쇄 추돌 방지
V2I(Vehicle-to-Infrastructure): V2X의 양상 중 하나로, 차량과 도로 인프라 간의 통신 기술. 차량과 도로 노변 기지국 간 통신으로 차량 주행 정보를 중앙 서버로 전달, 분석 후 도로상황을 차량에게 알리는 방식. 차량은 실시간 교통상황과 돌발상황 정보를 받아 교통정체 및 사고 방지
📌주요 기술
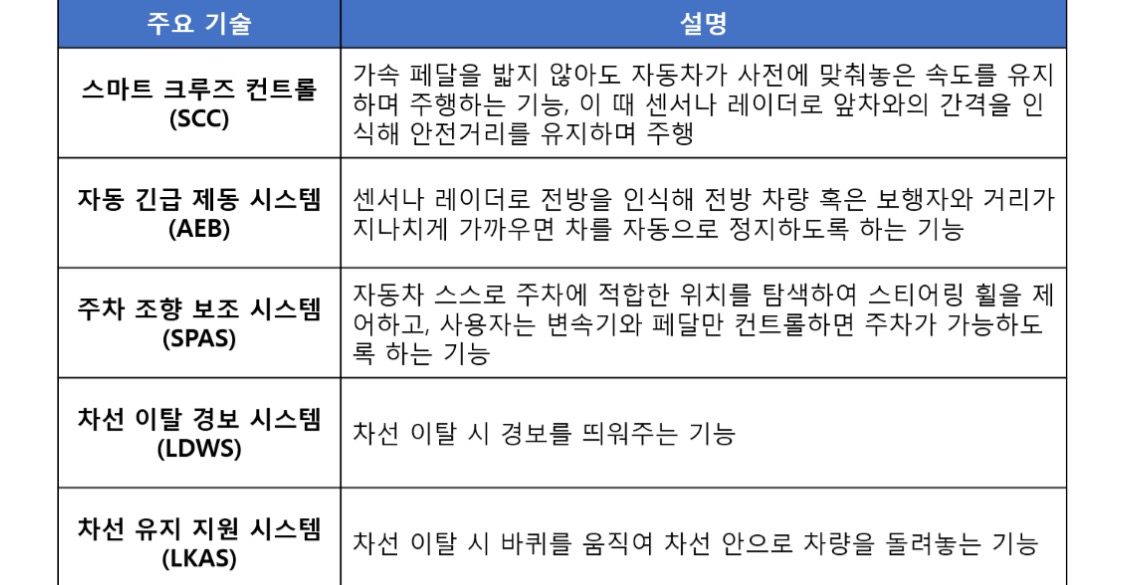
ADAS: 센서, GPS, 네트워크 통신 등 IT 기술들을 이용해 자동차가 스스로 자율주행을 할 수 있도록 도와주는 기술
ADAS 기술 예시
📌현대자동차 자율주행 기술
주행안전 기술
-전방 충돌방지 보조 FCA: 외부와 충돌 위험 감지 시 경고, 계속된 위험 증가 시 자동 제동
-차로 이탈방지 보조 LKA: 방향지시들 없이 이탈 시 경고, 이탈하지 않도록 자동 조향
-후측방 충돌방지 보조 BCA: 차로변경 및 주자상태에서 전진 출차 때 후측방 차량과 충돌 위험 감지 시 자동 제동
-안전 하차 경고 SEW: 하차를 위한 개문 때 후측방 충돌 위험 감지 시 경고
-안전 하차 보조 SEA: 하차를 위한 전자식 차일드 락 버튼 누를 때 후측방 충돌 위험 감지 시 락 잠김상태 유지 및 경고
주행편의 기술
-스마트 크루즈 컨트롤 SCC: 주행 시 앞 차와 거리 유지하며 운전자가 설정한 속도로 주행, 정차, 재출발
-내비게이션 기반 크루즈 컨트롤 NSCC: 안전구간, 곡선로, 진출입로 등 특정상황에서 감속 주행 후 속도 복귀
-차로 유지 보조 LFA: 차로 중앙 유지 주행
-고속도로 주행 보조 HDA: 고속도로 및 자동차 전용도로 주행 시 앞 차와 거리 유지 주행, 차로변경, 편향 주행
-고속도로 자율주행 HDP: 앞 차와 거리 유지 및 차로 유지의 조건부 자율주행; 한계 발생 시 제어권은 운전자로
주차안전 기술
-후방 모니터 RVM: 주행 및 주차 시 후방 상황 영상 제공
-서라운드뷰 모니터 SVM: 주행 및 주차 시 4개의 전방위 카메라에 입력된 영상 합성 후 360도 3D뷰 제공
-후방 교차 충돌감지 보조RCCA: 저속 후진 시 좌/우측 접근 차량과의 충돌 위험 감지 시 경고, 계속된 위험 증가 시 자동 제동
-전/측/후방 주차 거리 경고 PDW: 주차 및 출차 시 근접하는 물체와의 거리를 3단계로 경고
-전/측/후방 주차 충돌방지 보조 PCA: 주차 및 출차시 외부와 충돌위험 감지 시 경고, 계속된 위험 증가 시 자동 제동
주차편의 기술
-원격 스마트 주차 보조 RSPA: 차량 외부에서 원격 주차 및 출차 도움; 주차공간 탐색 및 자동 조향, 가감속 및 변속 도움; 물체 감지 시 자동 제동
-원격 자율 주차 RPP: 차량 외부에서 원격제어로 주차 및 출차; 원격 자율 주차 구역과 주차 위치 간 이동경로 생성 및 무인 주행 제어
'IT 보안 > 네트워크 자율주행' 카테고리의 다른 글
| LIN 통신 (0) | 2023.04.12 |
|---|---|
| [자율주행] V2X (0) | 2023.04.07 |




